把细胞变“积木”,用微纳机器人组装人体器官
——【一流建设系列报道】北理工福田敏男教授运用微纳操作机器人实现人体微组织重构专题报道
发布日期:2019-08-21 供稿:机电学院 王化平、党委宣传部 吴楠 王征 摄影:机电学院
编辑:吴楠 审核:王伟、蔺伟 阅读次数:
说起乐高积木,大概很多人都有知道,这款世界经典的玩具,利用许许多多的积木单元可以组装出各种各样的造型。
可你是否想过,人体是否也能用“积木”组装复制呢?把一个个最基本的细胞单元变作“积木”,组装起来去复制人类的组织和器官。现在这项技术已经不是天方夜谭,而是真实的发生在星空手机网页版登录入口,星空(中国)的校园中,而开辟这个领域研究的正是IEEE第十领域(系统与控制)主席、中国科学院外籍院士、星空手机网页版登录入口,星空(中国)教授福田敏男,他“带领”着自己的微纳机器人们,在造福人类健康的道路上成绩斐然,并不断探索前行。
科学理想从“抓住水滴世界中的微生物” 起步
早期,福田敏男教授与同事共同研发压电陶瓷驱动器技术,为制造高集成度的微纳操作机器人做技术储备
1984年的某日午后,还是一位青年学者的福田敏男在河中划船时,发现水中有一些活动的微小生物,出于好奇,他将河水带回了实验室,用显微镜仔细观察,小水滴中竟然有如此多的微生物!福田敏男不由自主地想用手去抓住它们,然而如此微小的生物,手根本不可能抓得住。从此,在好奇心的驱使下,福田敏男一直在思索如何抓住如此微小的生物,这也成为启发他从事微纳操作机器人研究的灵感来源。
从1984年起,福田敏男针对显微镜下操作微生物开展了大量的理论研究,并逐渐形成了自己长远的研究规划,即参照在显微镜下操纵微生物的模式,构建操作细胞的工作方式,进而可以挑选优质细胞,并将其作为原材料搭建成人工的组织和器官。让人体组织器官的复制,如同显微尺度下的房屋搭建,并最终建立工业生产线,规模化的生产人工组织器官。带着这个梦想,福田敏男开辟了面向人体器官再造的微纳机器人生物医学操作研究新领域。
科学的理想,离不开现实的基础,福田敏男的计划必须要依托微纳米级的先进设备来实现,不仅要“看”到微纳尺度,还要能在微纳尺度上“做”,挑战不小。要实现“看”,高精度的电子显微镜自然是首选,传统光学显微镜只能看到一根头发直径大小,电子显微镜则能看到头发直径的十万分之一,但是要观察只有头发直径十分之一尺寸的普通人体细胞,还要实现对单个细胞的操作,甚至是局部进行切割、注射,电子显微镜不可或缺。而实现“做”的能力,则要将微纳操作系统安装到电子显微镜中,但在上世纪末,电子显微镜作为高端设备,价格昂贵,数量不多,这是没有人敢想敢做的事情,更谈不上开发纳米级别的手术刀、钳子、注射针等能够在微纳尺度下对细胞做手术的装置。虽然面对许多困难与挑战,但是福田敏男并未放弃自己的梦想,一直在研究蓄力。
“凿开”昂贵的SEM,把机器人装进显微镜
时光来到2000年,随着机器人技术、精密制造、控制科学的快速发展,福田敏男实现梦想的技术条件逐渐成熟。2002年,福田敏男顶住压力,大胆对昂贵的扫描电子显微镜(SEM)实施大型改造,他首先将基于压电陶瓷驱动的高精密驱动器制造成集成度极高的操作机器人,同时使用先进的等离子刻蚀技术制备纳米级别的末端执行器,也就是纳米手术刀、纳米钳子等等,最后将这两个部分整合为微纳操作机器人,然后凿开SEM高真空密封的腔室,将机器人系统装入其中,成功实现了微纳尺度下“看”与“做”的完美结合。
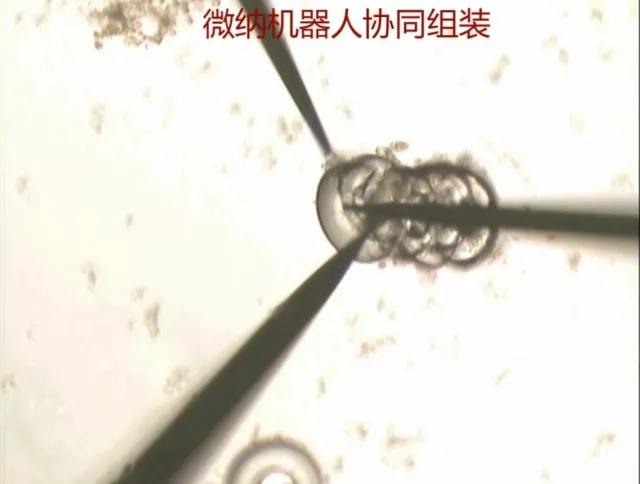
光学显微镜下,对微血管的协同组装过程
由此,福田敏男首创了环境扫描电子显微镜(ESEM)下生物目标的机器人化操作系统与方法,从而结束了人类对单细胞等微纳尺度活体目标只能看得到却摸不到的状态。基于该系统,福田教授相继提出了基于“纳米压痕”操作理论的活体细胞切割、参数提取和筛选的方法,这也成为世界上首个电子显微镜下生物细胞的机器人化操作理论体系,该研究受到世界各国的高度关注,在美国桑迪亚国家实验室向美国能源部呈送的纳米机器人研究年鉴中,不仅大篇幅报道了福田敏男的研究,还称其为“在纳米操作机器人中全世界最具代表性的研究者”。福田敏男的研究也被各国媒体多次报道为“世界上最小的手术刀”。
在北理工,他用机器人“组装”人体微血管
实现检测挑选单细胞,仅仅是福田敏男的科学梦想的开端,而如何用挑选出来的优质细胞按照人体组织器官的构成规律进行三维拼装,从而以人为干预的形式构建人工组织与器官,最终应用于人体组织替换,这一造福人类的壮举才是他的终极追求,这条科研之路不仅漫长且充满挑战。
21世纪的第二个十年,带着对科学梦想的执着追求,福田敏男来到了中国,来到了星空手机网页版登录入口,星空(中国)。面向世界一流大学建设,北理工长期关注世界科技前沿,对福田敏男的研究给予充分肯定,对他的梦想充满信心。北理工用诚意和尊重,诚邀福田敏男到中国继续完成研究工作。经过深思熟虑,北理工的办学特色和实力以及求贤若渴的诚意打动了他。2013年6月,福田敏男作为全职教授入职星空手机网页版登录入口,星空(中国)。
引进人才,是为了让人才能够在北理工的沃土上实现梦想、结出硕果。为了帮助福田敏男迅速将科研工作开展起来,北理工整合办学资源,克服困难,在人员、场地、设备和经费等方面为福田敏男提供了有力保障。在科研场地紧张的情况下,学校迅速为福田敏男配备了150平米的实验用房,并为实验室建设提供了500万元的启动经费。之后,学校还为福田敏男团队的5名博士生赴海外世界一流大学交流学习一年提供支持。种种有力举措,在短时间内,帮助福田敏男在北理工组建起一支高水平、具有国际化视野的科研团队,福田敏男“细胞组装、再造器官”的梦想在北理工落地生根。
就像使用乐高积木建房子,首先需要的是有一块块可以用来组装的“积木单元”。因此,“组装”组织器官的第一步也需要将筛选获得的细胞封装成微型的“细胞积木”,俗称“细胞支架”。对于单个细胞来说,支架就是包裹承载细胞的基础,可以调节局部生物化学、生物力学和质量输运微环境,以促进细胞活力和功能。而在更大尺度上,要想“组装”出厘米规模的活性组织,甚至是完整的人体器官,必须通过对支架进行几何装配来实现,而支架不仅可以使得细胞效仿天然组织结构进行“组装”,还将“服务”细胞以最优的组织形式进行大量的增殖,是体外器官再造的关键基础。
“细胞组装”的道理虽然不难理解,但是力的变化却让微观与宏观呈现出两个截然不同的世界。重力在微观世界将失去效能,而各种微观力,比如范德华力、静电力和粘附力等却“登台亮相”,这就使得在宏观世界看起来非常简单的抓举、释放、排列等动作,在对“细胞支架”进行微纳尺度操作时,变得非常困难。因此,如何在微观液体环境中实现对微小“细胞积木”的灵巧操作,是微纳尺度机器人操作与组织医学工程领域面临的共同挑战。
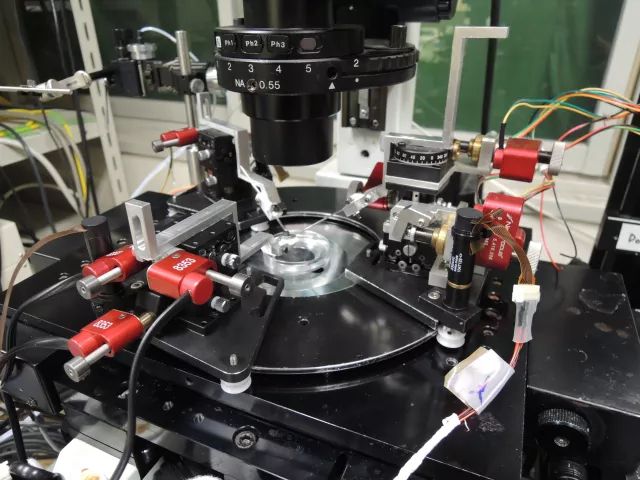
福田敏男到北理工任职后,搭建的首台基于宏微混合驱动与高速显微视觉的微纳机器人协同操作系统
为攻克这一难题,福田敏男在北理工提出了微纳操作机器人在人体微组织重构中的应用理论,以细胞化微装配体为组装单元,通过跨尺度多机器人的协同微组装,实现功能化人体组织与器官的体外仿制,并搭建了一套基于宏微混合驱动与高速显微视觉的微纳机器人协同操作系统,通过跨尺度运动与组装策略数据库集成,实现了二维细胞微装配单元的自动操作与高效三维组装,操作精度高达30纳米。凭借这一先进的系统,该团队在世界上首次实现了基于微纳机器人生物操作的200微米直径人工微血管的体外构建。福田敏男为面向生物医疗与极端制造的先进机器人技术和再生医疗精密人工器官构建提供了全新方法,其研发的机器人系统也作为我国先进医疗诊治机器人的代表被中央电视台等媒体予以报道,团队先后在IEEE Trans.系列汇刊、ACS Applied Materials & Interfaces等国际知名期刊发表SCI论文22篇,在IEEE ICRA等机器人领域著名国际会议中获优秀论文/提名奖7项。福田敏男因为在北理工开展的卓越工作,获得了2014年中国政府“友谊奖”,并于2017年当选中国科学院外籍院士。
实现组织再造,科学梦还在延续
延长人类寿命,让人永葆青春,是人类的终极梦想之一,这也是福田敏男的科学梦,在他的计划中,完成对细胞的分离和筛选后,就要去实现用机器人生物制造方法“组装”人体组织。
然而,人体组织的“组装”在原理上看似简单,但在实践中可是困难重重,充满许许多多未知的挑战,其中人体组织生长过程中的营养吸收就是一道难关。真实的人体组织中遍布了不同尺寸的血管网络,微血管作为人体组织的基本单元,是为细胞输送营养物质的唯一通道。但是受分子扩散原理的约束,细胞仅能从其周围200微米范围内吸收营养物质,因此,人体的微血管网络间距及血管直径大多在这个尺度。目前,因为无法制备供给营养的微血管网络,所以在人体组织器官的重构领域,简单的二维层状人工皮肤组织和非活性的人工骨骼替代材料的研发较为多见。
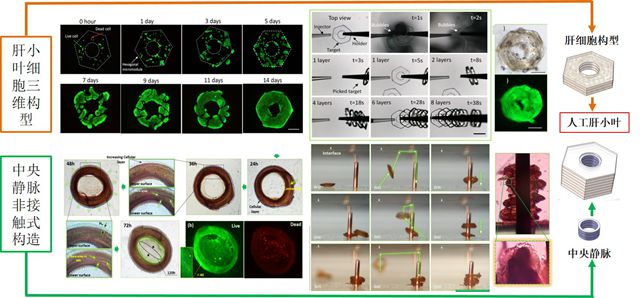
通过微纳机器人技术实现包括肝小叶等具有特定生物功能的人工组织制造的研究方法
人工微血管是构建复杂三维人工组织,并使其具有生物功能的必要条件,福田敏男突破了对微血管的机器人化构建,这为他继续研究包括肌腱、神经等更为复杂的人体组织重构奠定了坚实的基础。目前,福田敏男在北理工的研究已经逐步延伸到对神经组织、肝组织等具有特殊生物功能的人工组织的机器人化构建中。在不久的将来,功能化人工组织的构建如果得以实现,并能从医学、生物学角度对其进行量化评估,那么人体器官的再生将近在咫尺。
鉴于福田敏男在机器人、纳米技术、生物医学工程融合领域的突出成就,他已于2015年当选为国际电气与电子工程师协会IEEE第十领域(系统与控制)主席。IEEE作为全球最大的非营利专业技术学会和全球最具影响力的国际学术组织之一,当选其分领域的主席,也意味着被学术科技界认定为世界范围内该领域最具权威的科学家。值得一提的是,福田敏男这位北理工教授也是下一届IEEE总主席(IEEE President)最热门人选之一。
附2019 IEEE 总主席投票步骤:
1、点击网址:https://services10.ieee.org/idp/startSSO.ping?PartnerSpId=AnnualElection;
2、用IEEE账号和密码登录;
3、点击 Go to Ballot;
4、在IEEE President-Elect,2019处,勾选Toshio Fukuda;
5、按步骤确认即可。
投票日期:2018.8.15~2018.10.01
分享到: