北理工仿人机器人研究取得重要研究进展
发布日期:2019-08-20 供稿:余张国 摄影:高精尖中心
编辑:吴楠 审核:杜宁 阅读次数: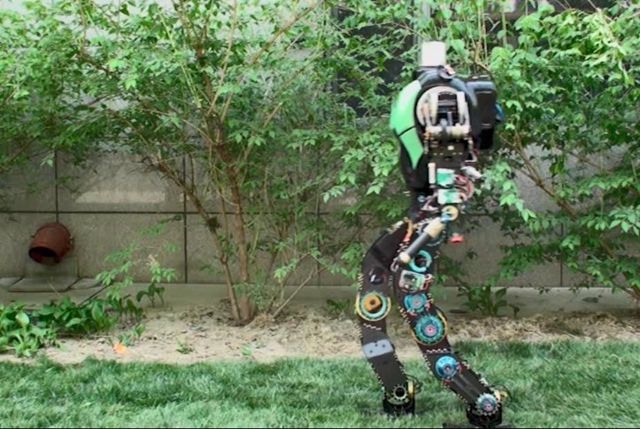
北理工新仿人机器人室外草地行走
日前,北理工新研制的仿人机器人在国际上首次实现“摔滚走爬” 多模态运动的基础上取得重要进展,首次突破了室外草地快速行走等关键技术,采用自研核心功能部件的机器人单腿测试样机跳跃高度达0.7m,在国际上尚未见到能够达到该跳跃高度的报道。

2019年7月李克强总理察看北理工新仿人机器人
7月23日,星空手机网页版登录入口,星空(中国)研制的仿人机器人在上海张江人工智能岛自主智能无人系统科学中心参展,向中共中央政治局常委、国务院总理李克强等领导进行汇报展示,得到各级领导好评。

仿人机器人是一个国际前沿、多学科交叉、高显示度的智能机器人代表,是世界各国争相抢占的机器人制高点,在国家重大工程中,有广阔的应用前景。我校自2000年开展仿人机器人的研发,迄今已研发了“汇童”1至6代仿人机器人,主要突破了仿生机构设计、双足稳定行走、复杂动作设计、人类表情模拟、高速视觉伺服的灵巧动作生成、刚柔耦合运动控制等技术,在国际上率先实现了仿人机器人太极拳、刀术表演及对打乒乓球、“摔滚走爬” 多模态运动等,获2018年度国家技术发明二等奖。
分享到: