【学以精工】北理工优秀专利成果:节能增效的主被动负载双电液伺服阀控系统
发布日期:2013-11-13 供稿:专利中心 成重任
编辑:党委宣传部 阅读次数:编制按:为了进一步加强学校学术文化、创新文化和人才文化建设,党委宣传部经过认真筹划,围绕我校重点科研学术进展,开辟《学以精工》科研学术新闻报道专栏,旨在针对我校科研学术工作中取得的新成绩、新进展进行重点报道,用通俗易懂的新闻报道,向校内外展示星空手机网页版登录入口,星空(中国)的深厚科研实力和浓厚的学术氛围。本栏目得到了图书馆战略情报研究部和学校专利中心(北京理工纬铂知识产权代理有限公司)的支持。欢迎全校单位和师生踊跃提供线索或投稿(aiken@bit.edu.cn),宣传部将第一时间安排重点报道。
液压缸是将液压能转变为机械能的、做直线往复运动(或摆动运动)的液压执行元件。它结构简单、工作可靠。用它来实现往复的直线运动时,可免去减速装置,并且没有传动间隙,运动平稳,因此在各种机械的液压系统中得到广泛应用。
目前在液压缸控制领域,一种重要的控制系统是电液伺服系统。这种控制系统因其功率体积比大,在大功率应用场合具有不可替代的作用,尤其是其中的电液伺服阀控缸,更是在武器系统、冶金、工程机械中被广泛的应用。在传统电液伺服阀控系统中,大多是采用一个阀门对液压缸或液压马达进行控制,这样单个的控制方式并不能很好地处理液压缸往返运动所受力不同的问题。在液压缸受到正向的作用力时,它仍需向系统提供高压能源才能维持其持续运动,造成了极大地能源的浪费。此外,单个电液伺服阀的最大流量往往不能满足要求而且只要这一个电液伺服阀出现故障后,整个液压系统将无法正常工作,容错率低。
针对传统电液阀控系统的问题,自动化学院王军政教授带领课题组教师,进行了大量的相关研究,客服了相应的技术障碍,提出了一种双阀门协同控制、液压泵和阀门协同控制流量的节能阀控方案及控制策略,取得了一定的研究成果,并申请了大量的发明专利,其中比较典型的就是“一种节能式主被动负载的双电液伺服阀控系统”。
该发明提供了一种节能式的控制系统及控制方法。通过两个电液阀门对油路进行切换控制,不但能实现对液压缸或液压马达两个腔体的独立控制,达到节能目的(双阀独立控制模式),而且当两个伺服阀并联工作时流量也会增大一倍(并联工作模式),容错率也会更高。电液伺服阀的供油方式的特殊设计,既可以节省高压能源,又可确保其在任何情况下都能向液压缸或液压马达提供低压油。
将科研成果通过申请专利的形式进行保护已经成为我校老师的一种普遍的做法。此项专利技术是我校近年来众多优秀科研专利成果之一。在今后的专题新闻中,专利中心和宣传部将会陆续选取各领域优秀专利成果进行重点报道
附件:
结合该伺服阀控系统的油路图对独立控制模式进行简要的介绍
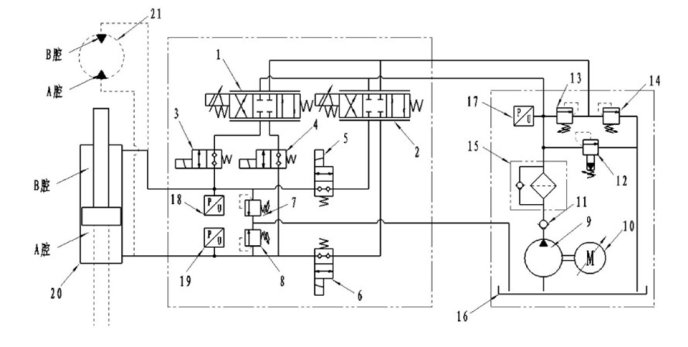
1 第一电液伺服阀,2 第二电液伺服阀,3 第一两位两通电磁阀,4 第二两位两通电磁阀,5 第三两位两通电磁阀,6 第四两位两通电磁阀,7 第一压力阀,8 第二压力阀,9 液压泵,10 伺服电机,11 单向阀,12 比例溢流阀,13 减压阀,14 第三压力阀,15 过滤器,16 油箱,17 第一压力传感器,18 第二压力传感器,19 第三压力传感器,20 液压缸,21 液压马达
当控制第一两位两通电磁阀和第四两位两通电磁阀接通且第二两位两通电磁阀和第三两位两通电磁阀关闭,此时系统处于双阀独立控制模式。当液压缸伸出或液压马达顺时针旋转过程中受到主动负载时,控制第一电液伺服阀和第二电液伺服阀斜通; 当液压缸伸出或液压马达顺时针旋转过程中受到被动负载时,控制第一电液伺服阀斜通、第二电液伺服阀直通,并且第二电液伺服阀直通时其阀芯开口全部打开至最大。
基本工作原理为:通过设置在执行机构的传感器采集执行机构的当前运动速度及运动加速度估计下一个时刻的运动速度;下一时刻的运动速度= 当前运动速度+ 当前运动加速度×传感器采样时间间隔;根据计算得到的下一时刻的运动速度计算执行机构所需要的流量,控制交流伺服电机的转速使得液压泵输出满足需求的液压油流量。
(审核:仇蕾安 赵江波)
分享到: