【学以精工】“明察秋毫”的北理工“小门神”
——GrC最优论文助力北理工机器人足球队勇夺全国冠军
发布日期:2014-04-01 供稿:软件科技创新创业基地 摄影:软件科技创新创业基地
编辑:新闻中心 王征 阅读次数:
谈到北理工的足球,师生们津津乐道于学校足球队的驰骋夺冠,代表中国出征更是一展北理工学子的风采。殊不知,在星空手机网页版登录入口,星空(中国)的校园中还有一只足球冠军队,而全国总冠军的它们展示的则是北理工学子卓越的创新精神和科研能力,这就是在2013年中国机器人大赛暨RoboCup公开赛上首次斩获全国冠军的星空手机网页版登录入口,星空(中国)机器人足球队。
在这支总冠军球队中,除了“能抢善射”的“前锋”和“后卫”们,出奇制胜的法宝当属其中“一夫当关 万夫莫开”的北理工的“小门神”,它凭借超强的“守门意识”和敏锐的“洞察力”,在比赛中“左扑右挡”,成为夺冠的最大功臣。
夺冠的“幕后英雄”——软件学院科创基地的师生们可谓倾尽心血,他们以足球对战为实际应用背景,围绕球场对战形势变化快、防守难度大的实际问题,提出了守门员区域划分防守策略以及三维视觉模型技术应用的解决方案,正是创新的技术策略成为了夺冠“秘籍”,基于此项创新,软件科技创新创业基地的马辰、闫梓祯、梁宇、申宇、徐杰、齐冀、杨一川、高黎明、张博伟、金科等同学撰写了题为《Defensive Strategy of the Goalkeeper Based on the 3D Vision and Field Division for the Middle-size League of RoboCup》的学术论文,在2013年12月第九届IEEE国际粒计算学术会议(IEEE GrC2013)上获得了大会唯一的最优论文奖(Best Paper Award)。
机器人世界杯(RoboCup)不仅仅是一项竞赛活动,其意义更加深远,是以多智能体系统(Multi-Agent System)和分布式人工智能(Distributed Artificial Intelligence)为主要研究背景的国际合作项目,该项目的最终目标是:到2050年,开发完全自主仿人机器人队,能赢得人类足球世界冠军队。
机器人世界杯系列活动1997年首次举办,现已成为世界上规模最大、参与人数最多、学术成分最高的机器人赛事,为了真正实现机器人团队的竞争,机器人足球队要在智能体自主设计、多智能体协作、策略获取、实时推理、机器人和传感器融合等多方面实现技术融合。在机器人足球系列赛事中,全分布式和全自主的RoboCup中型组足球机器人是最理想的多智能体协同测试平台,它能够通过视觉系统与无线通信实时获得信息,实时地对赛场情况进行分析、自主进行战场形势判断、自主调整球队内部配合、指挥机器人完成相关攻击或防守动作。因此中型组是机器人世界杯中学术含量最高、最具影响力与观赏性的比赛项目。
中型组足球机器人运动系统非常灵活,运动速度可达15米/秒,踢球凶狠,球速可达6米/秒,还可以实现推射、挑射等多种射门方式,瞬息万变的场上形势,极难进行有效的防守。因此,作为最后一道防线的守门员机器人就成为了比赛胜负的关键。守门员机器人通过摄像头获取场上信息,经过数据分析发现来球方向后,由中央处理系统控制底部全向移动系统及伸缩臂防守系统,阻止进球。传统的守门员防守方法主要有两种,一种是国际普遍采用的定点站位加伸缩臂防守法,此种方法对高空球拦截成功率较高,但面对高速球却无能为力,另外一种是国内球队普遍采用的主动出击封堵的防守策略,此种方法可以提前封堵射门角度,成功阻挡高速球,但是却无法拦截角度刁钻的吊射。




正式基于对传统守门员机器人防守方法的分析研究,北理工机器人足球队经过探索,提出了守门员区域划分防守策略及三维视觉模型技术相结合的防守方案。区域划分防守策略可以使守门员面对任何角度的射门都能采用合理的站位,以获得最大防守面积,移动最短的距离拦截射门,而三维视觉模型技术则能够实时拟合高空球的飞行轨迹,准确预判其落点。两种技术的结合形成了全方位、立体化的防守体系,对目前出现的所有射门类型都可以有效阻挡,实现了对高速球和高空球的兼顾防守,无论是极快的推射,还是高空下坠球,都能较好地进行拦截,极大的提高了守门员机器的防守能力。
区域划分防守策略
根据对球门威胁的不同,和足球比赛的规则,可以将球场划分多个区域。场地划分主要是根据球所在的位置进行的。而场地的分块线,主要是根据球的射门角作为主要依据的。如图1所示,假设P点和p1点为门前任意一点。当a=b时,P点和P1对门的威胁程度相同。
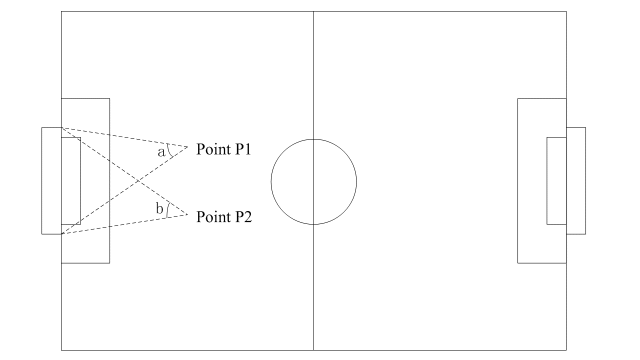
图1
机器人足球比赛场地可以分为7个区域,如图2所示。其中,区域0为球门区,区域1和区域3为低危险区,区域2为大禁区,区域4和区域5为次危险区,区域6为危险区。区域7为安全区。
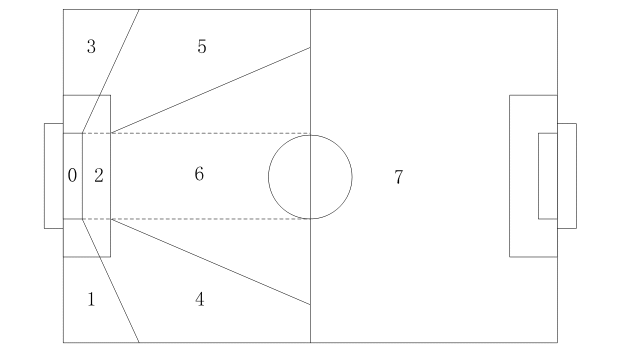
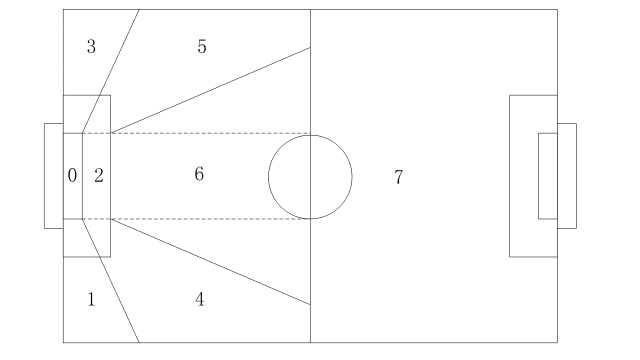
图2
区域0为球门区,当球进入球门区时,守门员主动上前拼抢足球,并踢出足球。区域1和区域3为低危险区,所以守门员采用定点防守站位法站位,即站在大禁区边线上,足以挡住射门角度。区域2为大禁区,这时射门角度达到了极大值。根据对手的进攻特点,可以选择上前拼抢、贴身防守或中角线最优站位法防守。中角线最优站位法是指在射门角角平分线与足球到门线的中线两者与门线的交点及门线所形成的的区域内进行实时移动防守的策略,移动区域选取方法如图3所示。该策略能及时的根据球的位置,调整自己的站位,达到一个最优的防守位置。区域4和区域5为次危险区,在这个区域,对方球员的射门角度不大,这时候采用中角线最优站位法。足球在区域6的时候,射门角度仅次于大禁区。足球在该区域时,双方拼抢频繁,射门次数也很多,所以采用延长线法。足球在区域7,即为在对方半场,这时候我方球门是安全的。所以守门员不需要任何移动,站在球门中心点即可。
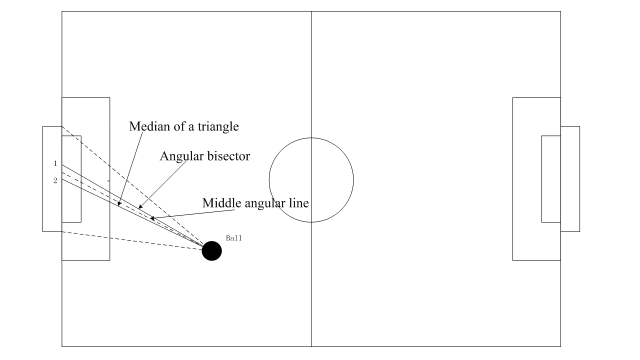
图3 中角线防守策略示意图
经过对场地划分之后,守门员对球场上任意位置的来球都能做出最合理的移动站位和最正确的处理行为,降低了守门员防守的代价,提高了防守的成功率。
三维视觉模型技术
中型组机器人足球比赛的对抗性极强,机器的移动速度极快,因此对机器人的反应能力有很大的要求。对守门员来说,其应对的是对方的高速射门,所以球定位的速度及准确度要求尤为严格。但是限于机器搭载的计算机的处理能力,难以达到这样实时处理图像的要求。为解决此问题我们提出了视觉自适应系统的解决方案。该系统以人为事先预定的知识为依据,然后由机器对环境逐步自学习、自适应,表现为越来越准确的识别效果。同时为了降低所需要处理数据的空间复杂度,视觉系统将原有的全局搜索变为局部跟踪,使用粒子滤波算法,建立物体特征的离散模型,并增加中值滤波来对所记录的物体特征进行更新以达到对物体的特征跟踪和学习的同步。同时处理的数据也由原本的图像矩阵,减少为100到200的特征点的权值和坐标分布。最后再辅助以霍夫变换等图像处理方法,实现对球、障碍物、场线的快速识别,使机器可以实时掌握赛场信息。该系统识别效果如图4所示。
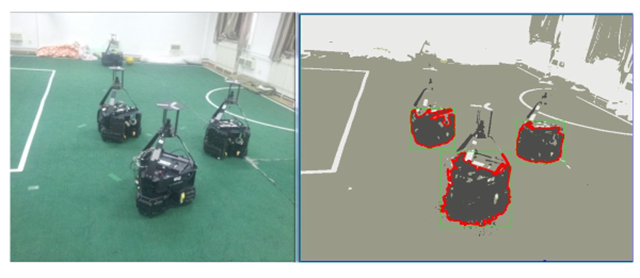
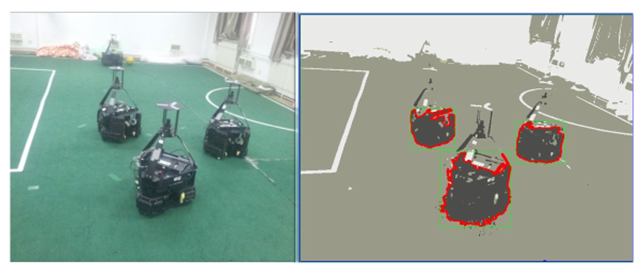
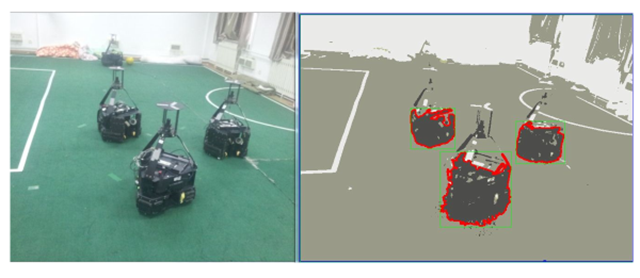
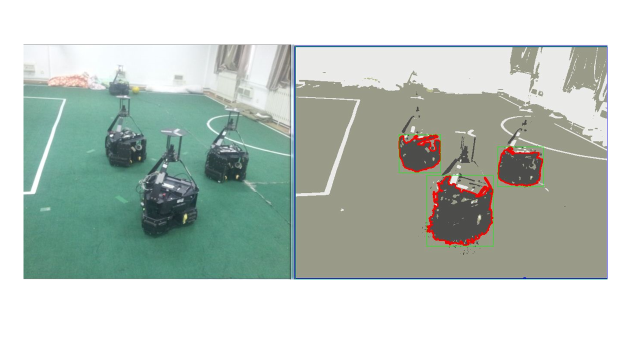
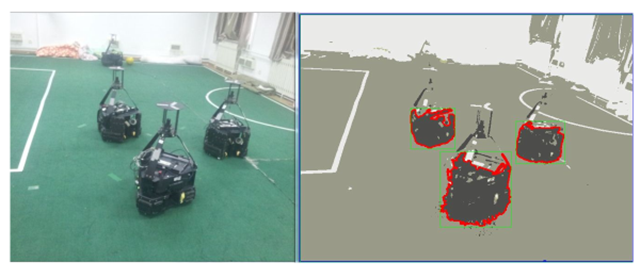
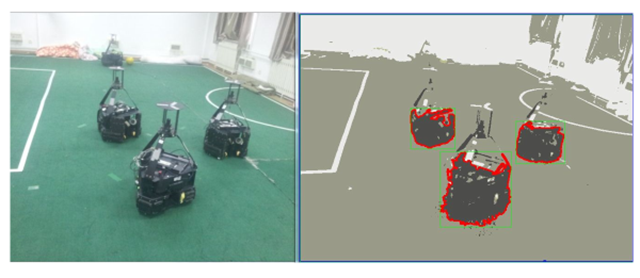 图4
图4 中型组机器人普遍采用全景反射镜头来获取球场的全向信息。但是该种镜头会受到其高度的限制,高过反射镜的图像无法获取,因此守门员机器对比赛中常常出现的远距离吊射无法应对。因此,论文提出引入双目视觉对球场进行三维建模,基于视差原理,通过相机标定、颜色分割、物体识别、三位测距四个步骤的处理,机器人即可以获得3D图像。北理工机器人足球队使用的是两个广角120度摄像头,采用广角镜头是为了增加机器的可视范围以及降低成本,但是所得到的图像畸变严重。因此后期采用算法进行了矫正处理,效果如图5及图6所示。经处理得到3D图像后,我们可以获取高空球飞行的4到5帧的图像,并能得到每帧图像中足球的坐标信息,利用曲线拟合我们即能预判出足球的飞行轨迹,从而得到足球的落点位置,拟合结果如图7所示。
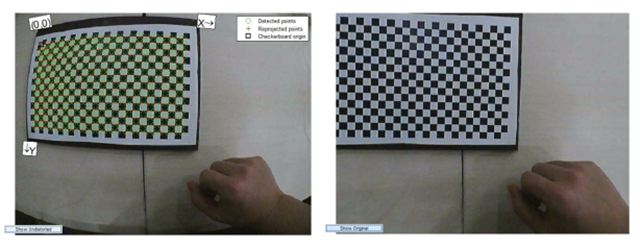
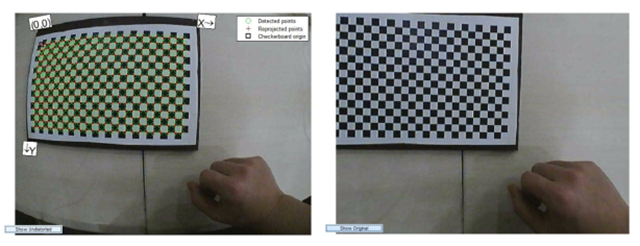
图5(左为校正前,右为校正后)
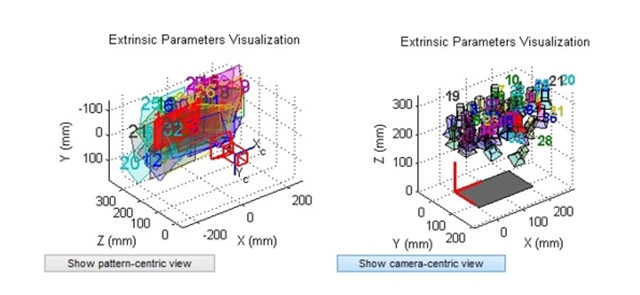
图6(作为校正前图像信息,右为校正后图像信息)
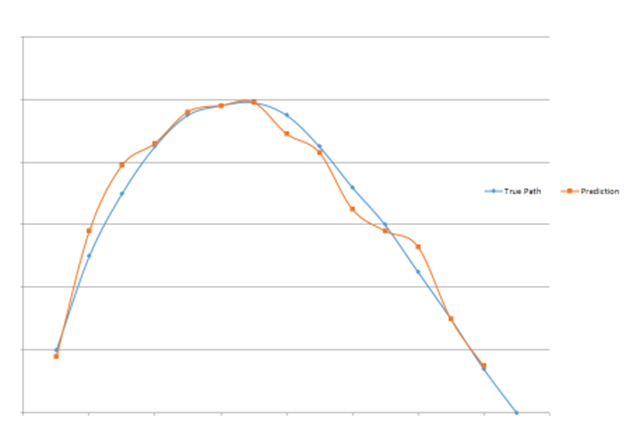
图7
经过在训练场地测试,以及在比赛实战中检验,守门员机器可以在防守中采取准确的站位,移动最短的距离获得最大的防守面积,同时对高空球也可以准确判断方向和落点,提前移动阻挡来球。
采用了区域划分防守策略以及三维视觉模型技术以后,北理工机器人足球队的守门员机器人比以前更加灵活,提高了对足球位置的识别率,增加对高空球落点预判的能力,在测试场地上,可以拦截进攻队员在球场任何位置上的多种类型的全部射门。在与世界冠军Water队的较量中,全场比赛Water队射正球门20次,但北理工机器人足球队仅丢一球,成功率高达95%。参考球队在国际和国内赛场的表现,该方案是世界上较优的守门员防守策略之一。目前该套策略正逐渐被国内多支球队直接采用,同时也被国外的球队学习、参考。
星空手机网页版登录入口,星空(中国)机器人足球队(Robit队)成立于2011年5月,团队由来自软件学院、宇航学院、机电学院、信息与电子学院、自动化学院、设计与艺术学院的的22名同学组成。团队以参加机器人足球中型组比赛为契机,致力于在人工智能领域做出成绩,研究方向涵盖硬件设备设计与制造、自动控制、机器视觉、多智能体协同等。球队曾获2011年中国机器人大赛暨RoboCup中国公开赛机器人足球中型组项目季军(一等奖),技术挑战赛(规定项目)二等奖,技术挑战赛(自选项目)二等奖;2013年RoboCup机器人世界杯取得机器人足球中型组项目第四名;2013年中国机器人大赛暨RoboCup中国公开赛机器人足球中型组项目冠军(一等奖),技术挑战赛(规定项目)亚军(一等奖),技术挑战赛(自选项目)亚军(一等奖)。两年来,团队发表学术论文六篇,申报国家专利1项。
备注:球队长期欢迎全校各专业优秀学生加盟,有意者可联系球队现役队长徐杰(752377627@qq.com),球队网站链接:http://ai.bitss.com.cn/。
分享到: